
Feliphe Gonçalves Galiza
Automation & Control Engineer
Artificial Intelligence Software Developer
Artificial Intelligence Software Developer
Hi, I'm Feliphe Gonçalves Galiza, an Automation & Control Engineer graduated from the University Center of FEI in São Paulo, Brazil. On my freshman year I started doing research in Robotics as a RoboFEI Team member. My main tasks where mechanical design, 3D modeling, manufacturing, dynamic simulation, and when in competitions I was responsible for the robots mechanical maintenance.
Later on, I went to study abroad at the University of Texas at El Paso where I took one-year classes mostly in Electrical Engineering and Computer Science. After living one year in El Paso, Texas I moved to Pittsburgh, Pennsylvania where I had the opportunity of being a Robotics Institute Summer Scholar at Carnegie Mellon University. Basically, my research work was on developing C++ code for solving the 6-DOF Inverse Kinematics of a Praying Mantis Robot, which can be see on this research paper.
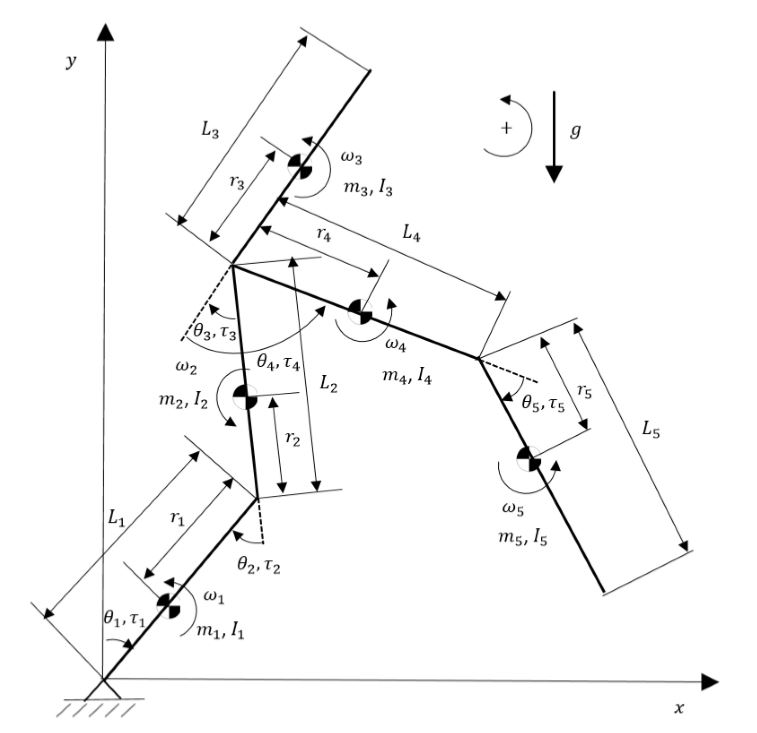
Back to my home country, I have developed research on Modeling and Optimization of Dynamic Gait for Humanoid Robots. Right now I am an Artificial Intelligence Specialist at Claro and I am also working on my Masters thesis which is related to Image Processing Algorithms applied to Astronomy with Prof. Dr. Fabio de Oliveira Fialho at the University of Sao Paulo.


Feel free to can contact me by mail.